ROSノード軽量実行環境mROSのユーザ定義メッセージ型対応に向けた機能拡張
Functionality expansion of the lightweight runtime
environment mROS for the user-defned message types
概要
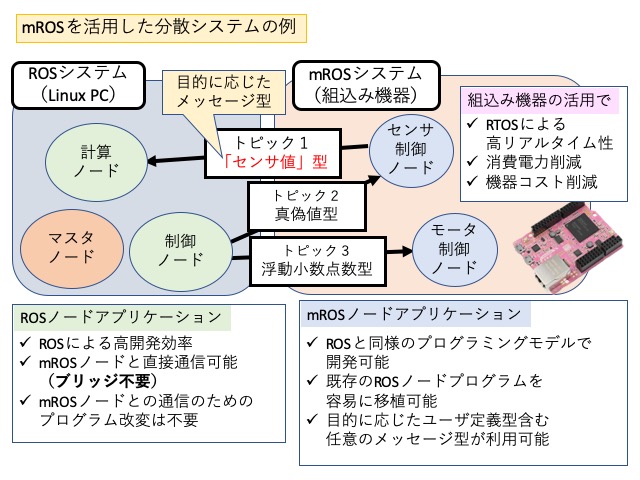
mROSは、ロボットシステム開発支援フレームワークであるROS(Robot Operating System)のノードを、組込み機器上で実行できる軽量実行環境である。
しかしmROSには、利用可能な通信メッセージ型が文字列型に限定されており、そのため汎用性および既存プログラムの移植性が低いという問題点があった。
そこで本研究では、mROSにおいて、ユーザが定義する型を含む任意のメッセージ型による通信を可能とするための手法およびmROS通信ライブラリの動作フローを提案する。
本研究により、ROSを搭載する汎用機器およびmROSを搭載する組込み機器が協調するシステムの開発が促進されると考えられる。
産業界への展開例・適用分野
ROSはオープンソースで開発されており、様々な機器や目的に対応したプログラム資産が豊富に存在する。
本研究の提案により、そのようなプログラムを容易にmROSへ移植し、組込み機器上で実行することができるようになる。
これにより、組込み機器を活用するシステムをより効率よく開発できるようになる。
このことは、複数の組込み機器が協調動作し、低消費電力性が求められるIoTシステム開発においても重要である。
研究者
| 氏名 | 専攻 | 研究室 | 役職/学年 |
|---|---|---|---|
| 祐源 英俊 | 通信情報システム専攻 | 高木研究室 | 修士1回生 |
| 高瀬 英希 | 通信情報システム専攻 | 高木研究室 | 准教授 |
| 高木 一義 | その他所属 | 三重大学高木研究室 | 教授 |
| 高木 直史 | 通信情報システム専攻 | 高木研究室 | 教授 |