車両運動統合制御とタイヤ力配分最適化
概要
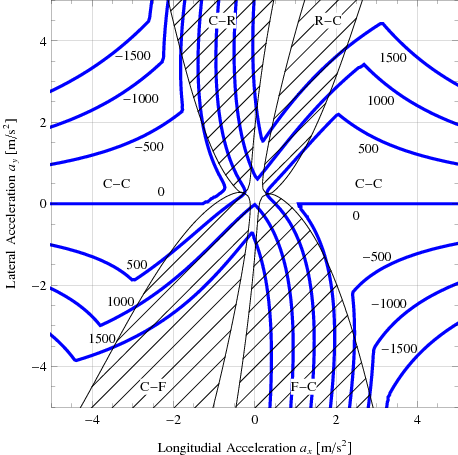
乗用車などの四輪車両では、制駆動と操舵を協調させる統合制御の概念が次第に普及してきている。駆動系、操舵系の構造によるが、制駆動力やコーナリングフォースの配分には自由度があるため、操縦安定性の向上、スリップ損失の低減を目的とした最適化について検討している。操縦安定性に関しては、タイヤ・ワークロードの最大値を指標としたリアルタイム最適化として、各車輪の制駆動力と操舵角の参照値を出力する計算手続きを導出している。スリップ損失については、消散するエネルギーを最小となるように目的関数を設定する。報告する解析例では、タイヤ力の最適配分は計算手続き、あるいは、数式解として表現される。
産業界への展開例・適用分野
発表内容は実用化の進展している車両挙動安定化制御(Electronic Stability Control)と関連が深く、ESCの有効性を基礎づける意味合いがある。ESCでは、制動力配分による直接ヨーモーメント制御でOS, USなどを防止するが、本発表のように最適配分について調べると、ESCについて理論上の限界性能が判明する。制駆動力配分の実装にはEVが適している。
研究者
| 氏名 | 専攻 | 研究室 | 役職/学年 |
|---|---|---|---|
| 山辺 勇輝 | システム科学専攻 | ヒューマンシステム論 | 修士2回生 |
| 西原 修 | システム科学専攻 | ヒューマンシステム論分野 | 准教授 |