Defogging Kinect: 散乱媒体下での物体領域と奥行きの同時推定
Defogging Kinect: Simultaneous Estimation of Object Region and Depth in Foggy Scenes
概要
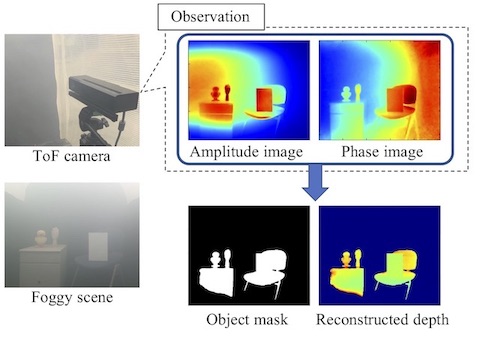
本研究では霧や煙が充満した環境(散乱媒体)下でTime-of-Flight (ToF) カメラを用い、観測した画像中の物体領域とその奥行きを同時に推定する手法を提案する。散乱媒体下では光が減衰することに加え、物体表面で反射した光のほかに空間で散乱した光も観測されてしまうため、ToF カメラによる奥行きの計測精度が低下する。本研究では散乱光の影響を物理的にモデル化し、iteratively reweighted least squares の枠組みで、画像中の物体領域の推定と奥行きの復元を同時に行う手法を開発した。
産業界への展開例・適用分野
火災現場などの煙が充満したような環境における、障害物の自動検知とその距離推定に利用できると考えている。また、将来的には自動運転車に搭載することで、悪天候でも自動車が周囲の環境を認識できるようになると考えている。
研究者
| 氏名 | 専攻 | 研究室 | 役職/学年 |
|---|---|---|---|
| 藤村 友貴 | 知能情報学専攻 | 飯山研究室 | 博士1回生 |
| 薗頭 元春 | 学術情報メディアセンター | 飯山研究室 | 研究員 |
| 飯山 将晃 | 学術情報メディアセンター | 飯山研究室 | 准教授 |