組込み向けROS軽量実行環境mROSのTOPPERS/ASP3カーネルへの対応
概要
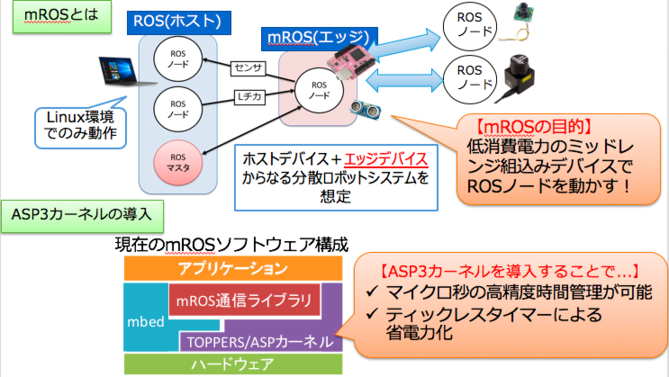
近年ロボット研究・開発の現場において、開発支援フレームワークとしてROS(Robot Operating System)が注目されている。ROSは、ソフトウェアとコンポーネント間の通信層を提供するミドルウェアであり、Linux/Ubuntuでの使用を想定しているが、それゆえ省電力化、リアルタイム性の確保が課題であった。
高木研究室ではこの課題に対し、組込みデバイス向けROSノード軽量実行環境mROSを開発している。現在は、mROSのリアルタイムカーネルとして今用いているTOPPERS/ASPカーネルに代わり、改良・拡張されたASP3カーネルを導入し、検証と性能評価を行っている。
産業界への展開例・適用分野
mROSの実現により、ROSを用いた分散ロボットシステムの省電力化とリアルタイム性の向上、
さらにTOPPERS/ASP3カーネルを導入することで、ティックレスタイマーによる更なる省電力化とマイクロ秒という高精度な時間管理をmROSで実現することができると予想される。
展開例として、エッジコンピューティングでの活用や、自動車やFA機器での非常に短い応答時間を求められる場面での活躍が期待される。
研究者
| 氏名 | 専攻 | 研究室 | 役職/学年 |
|---|---|---|---|
| 今西 洋偉 | 通信情報システム専攻 | 高木研究室 | 修士1回生 |
| 高瀬 英希 | 通信情報システム専攻 | 高木研究室 | 助教 |
| 高木 一義 | 通信情報システム専攻 | 高木研究室 | 准教授 |
| 高木 直史 | 通信情報システム専攻 | 高木研究室 | 教授 |