FPGAを活用したROS自動運転ロボットの実現
Realization of ROS automatic driving robot using FPGA
概要
近年の自動運転開発においては、高度な情報処理による安全性とリアルタイム性の両立が求められている。
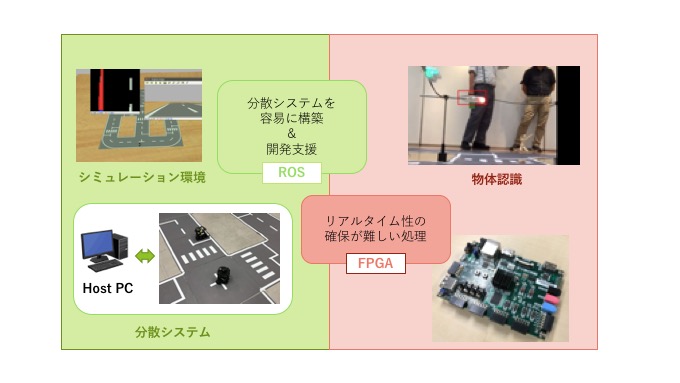
画像処理やセンシングにおいて、FPGAによるハードウェアアクセラレーションを活用し、CPUと並列で処理を行うことで消費電力の削減や処理の高速化が期待できる。さらに、我々はシステムをROSと統合させることを提案する。ROSではロボット・アプリケーション作成を支援するライブラリやツールが提供されており、ロボット開発で重要となるシミュレータやデバッグに適した開発環境が用意されている。
本研究では実際にFPGAを活用したROS自動運転ロボットを作成し、ROS×FPGA統合開発手法の提案および評価を行った。
産業界への展開例・適用分野
FPGAとROSを連携したシステムは自動運転だけでなく、複雑な計算を必要とする高度な単体動作ロボットや、高いリアルタイム性によるより正確な動作を行えるロボットなど、様々なロボットに拡張することが可能である。そのため、ROSシステム上でFPGAを用いる方法および実装方法を提案することで、ロボットシステムの可能性の拡大や推進が期待される。
研究者
| 氏名 | 専攻 | 研究室 | 役職/学年 |
|---|---|---|---|
| 田村 爽 | 通信情報システム専攻 | 高木研究室 | 修士1回生 |
| 新田 泰大 | 通信情報システム専攻 | 高木研究室 | 修士1回生 |
| 高瀬 英希 | 通信情報システム専攻 | 高木研究室 | 助教 |
| 高木 一義 | 通信情報システム専攻 | 高木研究室 | 准教授 |
| 高木 直史 | 通信情報システム専攻 | 高木研究室 | 教授 |