ドローンのフェイルセーフを実現するリアルタイム最適化
Real-time Optimization to Achieve Fail-safety of Drones
概要
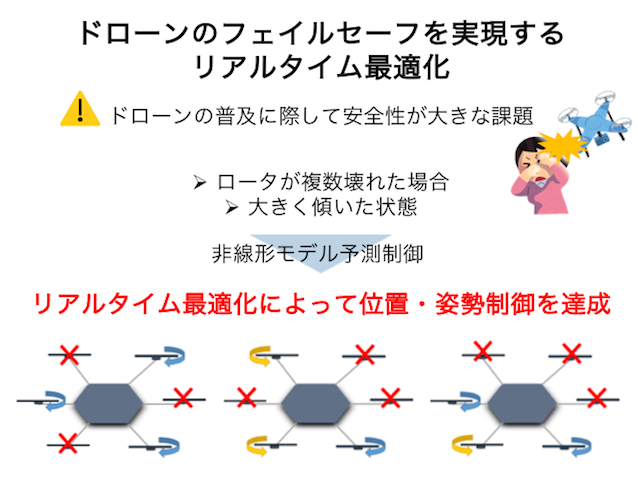
ドローンの普及とともに飛行制御の高度化が求められている。本研究では、6ロータのドローン(ヘキサコプタ)について、3枚のロータが停止した場合の安定化制御をリアルタイム最適化に基づく非線形モデル予測制御によって行なう。ロータが停止した状況として、1枚ずつ離れた3枚が停止した場合、隣り合う2枚と離れた1枚が停止した場合、隣り合う3枚が停止した場合の3通りを考える。非線形モデル予測制御を適用することにより平衡状態から大きく離れた初期状態からや、静的な平衡状態が存在しない場合でもヘキサコプタの位置・姿勢の制御を行なえることをシミュレーションにより示す。
産業界への展開例・適用分野
近年、ドローンが急速に普及し始め、農業、宅配、災害救助、測量、インフラ点検など様々な分野での活躍が期待されており、人間が活動する上空を飛び交うよう社会となることは容易に想像される。普及に向けたドローンの墜落への対策として、本研究ではロータ停止時の制御に取り組んでいる。
研究者
| 氏名 | 専攻 | 研究室 | 役職/学年 |
|---|---|---|---|
| 青木 佑介 | システム科学専攻 | 統合動的システム論分野 | 修士1回生 |
| 大塚 敏之 | システム科学専攻 | 統合動的システム論分野 | 教授 |