【mROS】組込みマイコン向けROSノード軽量実行環境
概要
近年のサービスロボット開発では、開発支援フレームワークであるROS(Robot Operating System)の活用が注目されている。
ROSはソフトウェア・コンポーネント間の通信層を提供するミドルウェアであり、Linux 上での動作を想定している。
そのため、高機能かつ消費電力の大きいデバイスを採用する必要がある。
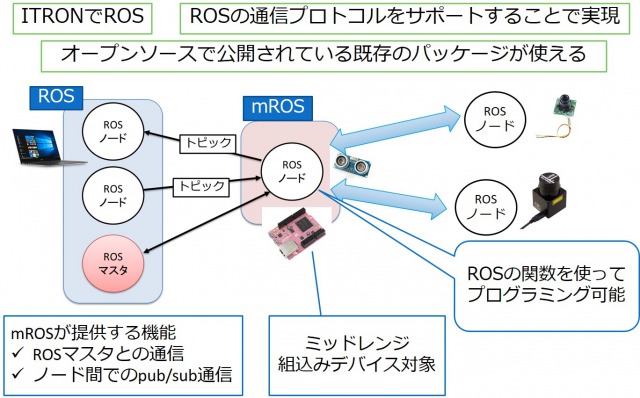
そこで本研究では、消費電力の小さなロボットシステムの実現を目的とし、リアルタイムOS およびTC/IP スタックを使用して、組込みデバイス上でROS ノードを実行可能な軽量な環境を提案する。
提案する実行環境を使用することでコンポーネントの省電力化およびリアルタイム性の確保が容易になると考えられる。
産業界への展開例・適用分野
組込みロボットシステムにおいて、低消費電力化、およびリアルタイム性の保証は非常に重要な要素となっている。
例えば、車の自動運転制御システムにおいてもROSは活用されており実車に搭載する際には安全性やコスト面からリアルタイムな組込みシステムが要求されている。
また、ROSではコンポーネント指向のシステム開発が可能であるため、mROSを活用することでIoTのシステムを実現することも可能であると考えられる。
研究者
| 氏名 | 専攻 | 研究室 | 役職/学年 |
|---|---|---|---|
| 森 智也 | 通信情報システム専攻 | 高木研究室 | 修士2回生 |
| 高瀬 英希 | 通信情報システム専攻 | 高木研究室 | 助教 |
| 高木 一義 | 通信情報システム専攻 | 高木研究室 | 准教授 |
| 高木 直史 | 通信情報システム専攻 | 高木研究室 | 教授 |