実時間最適化によるロボットの壁面登攀制御
概要
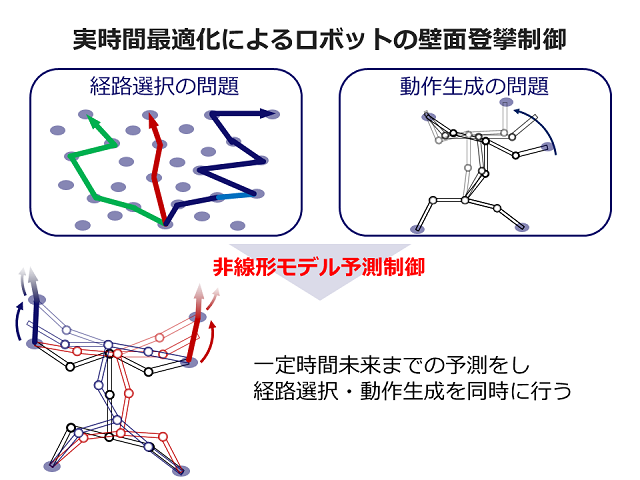
本研究では、ヒューマノイドロボットに、壁面に設置されたホールド(突起・へこみなど登攀の手がかり・足がかりとなるもの)を用いてクライミングをさせる制御手法を提案する。クライミングの制御は登攀に使うホールドの順序を決める経路選択の問題と、ロボットの登攀動作の生成の問題に分けられるが、本研究では非線形モデル予測制御を用いてこれらの問題を統合的に扱う。これによりロボットは、クライミング中に自律的に予測区間内のホールドに対する経路選択と、登攀のための動作生成とを行い壁面を登っていくことが可能となる。
産業界への展開例・適用分野
ロボットのクライミング移動の制御は、ヒューマノイドロボットの実用化に向けた適用が期待される。ヒューマノイドロボットはその形状から人間の生活に溶け込みやすく、人の生活に寄り添い活動することが期待されている。現在急速に発達しているそのコミュニケーション能力に加え、クライミングなどの人間が行う移動手段を身に着けることで、人間の生活空間でヒューマノイドロボットが人間の支援や救助を行うことが可能になる。
研究者
| 氏名 | 専攻 | 研究室 | 役職/学年 |
|---|---|---|---|
| 大山 和晃 | システム科学専攻 | 大塚研究室 | 修士2回生 |
| 大本 康平 | その他所属 | 大塚研究室 | その他学生 |
| 大塚 敏之 | システム科学専攻 | 大塚研究室 | 教授 |