視覚障害者-晴眼者-ロボット間におけるマルチモーダル情報保障技術の研究
Multi-modal Information Assurance among Visually Impaired Persons, Sighted Persons, Robots
概要
 |
|---|
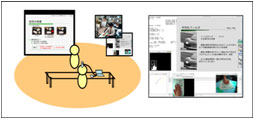
| 提案システムのイメージ ならびに 提示されるインタフェース画面 |
本研究は、視覚に障害のある人との共同注意に着目し、視覚障害者-晴眼者-ロボット間のコミュニケーションを通して、視覚障害者・晴眼者がともに生涯学習のコンテンツをマルチモーダルに知覚可能となる情報保障ロボットビジョンシステムを提案する。
具体的には、講演スライドデータに画像処理を施すことで、触知に適当な程度へと画像中の情報量を調整し立体コピーを行う。次に、立体コピー上で探索的に動かす視覚障害者の手先軌道を同定し、触図上での触覚的注意を推定した上で、学習に必要な内容を適切なタイミングにて提示を行う。
産業界への展開例・適用分野
超高齢社会で生きがいを創出する1つとして生涯学習の重要性が叫ばれているが、学習環境の整備において、視覚障害者に 対するバリアは従来の情報保障手段では解消しきれておらず,また,視力や体力の衰えが学習に及ぼす影響を推し量る具体的な研究はなされていない。
これらの問題に対し、特定の障害のある人をフォーカスして提案されるマルチプルシナリオを基に、そのアイディアが包含する対象ユーザを広げるインクルーシブデザインという手法の観点を取り入れることにより、新たなグループウェアの開発指針の提案が可能となる。
研究者
| 氏名 | 専攻 | 研究室 | 役職(学年) |
|---|---|---|---|
| 鍵山 泰尋 | システム科学 | 片井研究室 | 博士後期課程3回生 |
| 梁川 景樹 | システム科学 | 片井研究室 | 博士前期課程1回生 |
| 塩瀬 隆之 | システム科学 | 片井研究室 | 助教 |