ロボットの能動知覚経験に基づく物体特徴の自己組織化
Self-Organization of Object Features based on Robot's Active Sensing Experiences
概要
 |
|---|
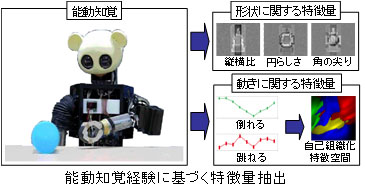
ロボットによる物体操作において、物体特徴量表現の設計方法は重要な課題である。物体特徴量には形状に関する特徴量と動きに関する特徴量がある。従来はこれらの特徴量を人手で事前設計していたため、想定した物体しか扱えないという問題点があった。本研究ではロボットの能動知覚経験を用いて、これらの特徴量を自己組織的に獲得する手法を開発した。一般物体を用いた実験の結果、ロボットの経験に基づいた適応的な物体特徴表現が獲得された。
産業界への展開例・適用分野
産業用ロボットによる部品操作への応用:部品操作において、さまざまな形状の部品に対してその形状を把握し、それぞれに適した把持操作を行うことは非常に困難である。本研究を応用することで、部品の形状を表現する特徴量を自動的に獲得でき、作業の効率化・高精度化に貢献することが期待される。
自律ロボットの社会導入に向けて:人間型ロボットなどの自律ロボットが人間社会に参入するためには環境適応性が大きな課題である。本研究では経験した環境に適応した知識形成を実現したので、適応的に動作を生成する枠組みを付加することで自律ロボットの社会参入に大きく貢献することが期待される。
研究者
| 氏名 | 専攻 | 研究室 | 役職(学年) |
|---|---|---|---|
| 西出 俊 | 知能情報学 | 奥乃・尾形研究室 | 博士後期課程3年次 学術振興会特別研究員 (DC2) |
| 尾形 哲也 | 知能情報学 | 奥乃・尾形研究室 | 准教授 |