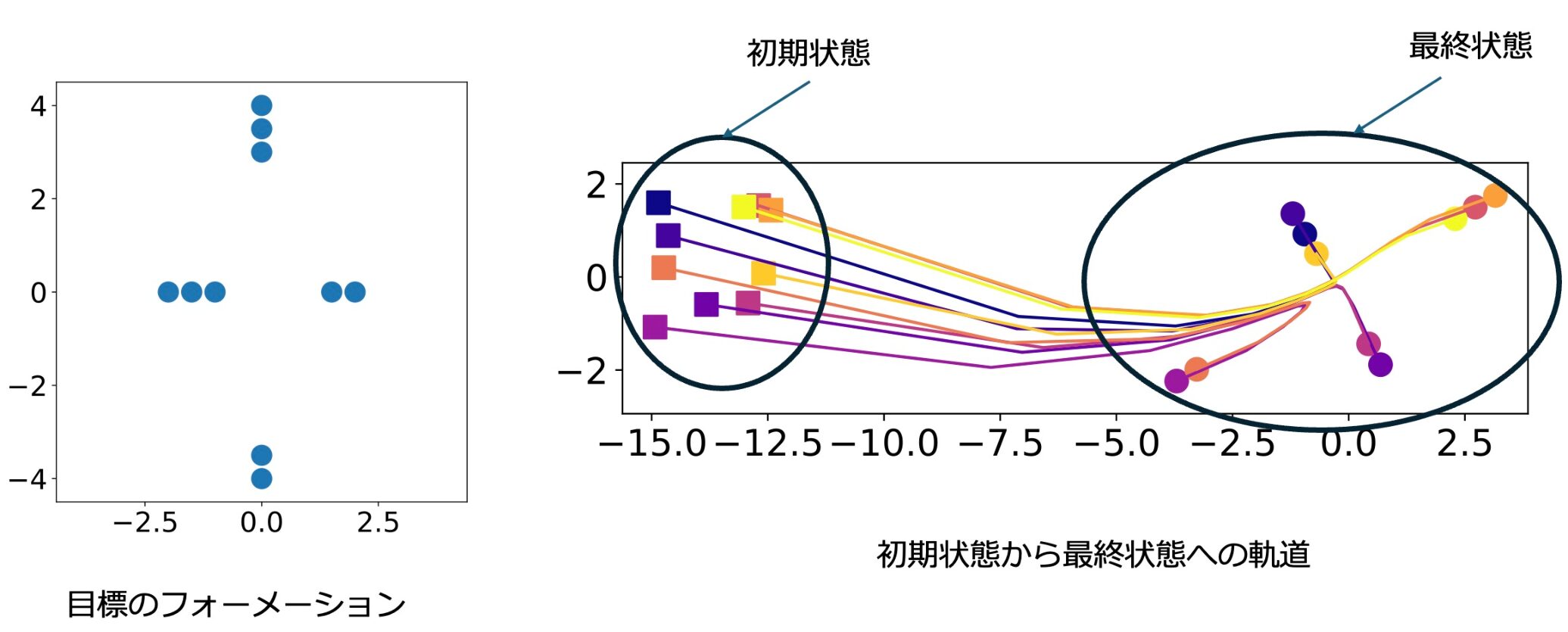
ドローンや自律走行ロボットなど,たくさんのロボットが協調して動く場面では,「どこにいるか」だけでなく「全体としてどんな形を作っているか」が重要になります。本講演では,ロボット群全体の「形」を数式でとらえ,その形を狙ったパターンに変えていくための制御手法を紹介します。
ポイントは,最適輸送という分野で近年注目されている Gromov–Wasserstein 距離 を使うことで,「位置のずれ」や「回転・平行移動」に影響されない“形の類似度”を定量化できることです。これを最適制御の枠組みに組み込み,ロボットを動かすためのエネルギーと,「なりたい形」とのズレを同時に小さくする制御問題として定式化します。
| 氏名 | コース | 研究室 | 役職/学年 |
|---|---|---|---|
| 中島晴人 | 数理工学コース | 制御システム論研究室 | 修士2回生 |
| Siddhartha Ganguly | 数理工学コース | 制御システム論研究室 | 研究員 |
| 加嶋健司 | 数理工学コース | 制御システム論研究室 | 教授 |