Differential game theory offers a systematic framework for analyzing decision-making among multiple dynamic agents. This study covers the reformulation and numerical method for solving differential games. The differential game problem is first reformulated as a differential complementarity system. Thereafter, the complementarity constraints are penalized within the objective function by using the D-gap penalty method, yielding a parameterized nonlinear programming (NLP) formulation. The D-gap penalty method is proposed as a new numerical reformulation for solving differential game problems. The proposed reformulation method can be solved numerically by the off-the-shelf NLP solver. The numerical experiment shows that, across almost all tested game scenarios, the proposed method achieved shorter computation times and better trajectory performance, even as problem complexity increased.
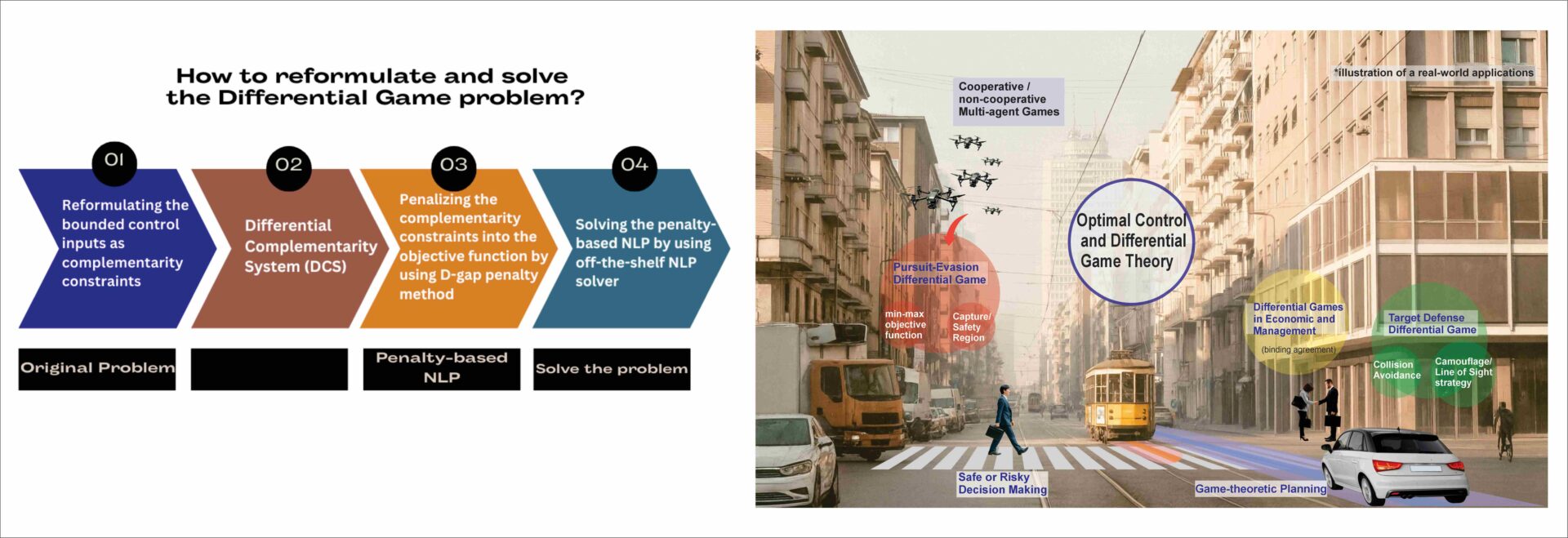
This numerical method can be applied to a wide range of dynamical systems, for example, autonomous vehicle systems, robotics, biological systems, energy management, economics, and so on.
| 氏名 | コース | 研究室 | 役職/学年 |
|---|---|---|---|
| Feni Isdaryani | システム科学コース | Integrated Dynamic Systems Theory | 博士3回生 |
| Kangyu Lin | システム科学コース | Integrated Dynamic Systems Theory | 研究員 |
| Toshiyuki Ohtsuka | システム科学コース | Integrated Dynamic Systems Theory | 教授 |