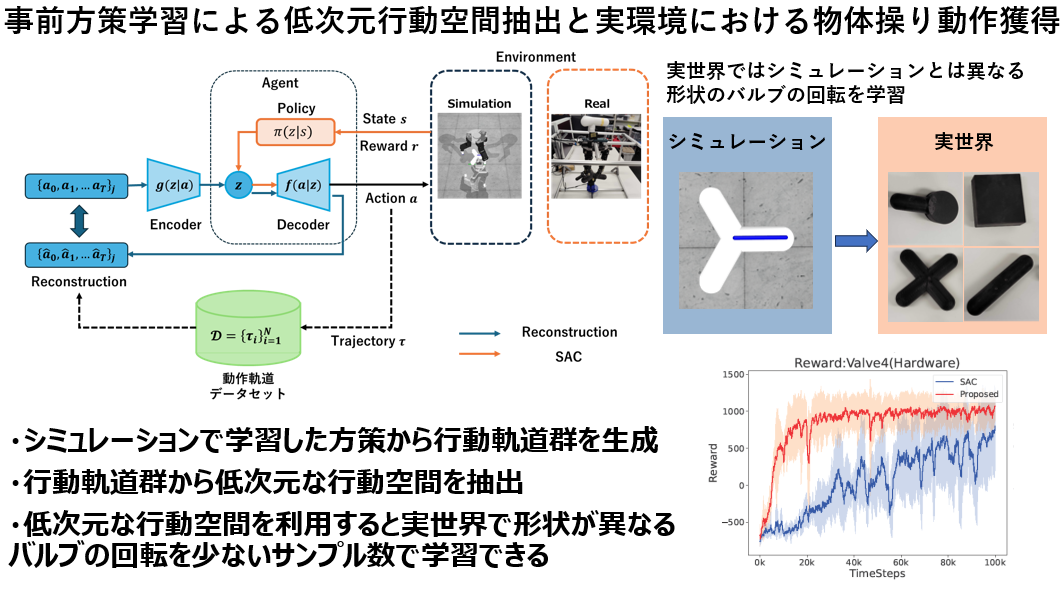
本研究では,多関節ハンドロボットが持つ多くの関節自由度を活用し多様な形状を持つ物体を操る方策を獲得するための方法を提案する.特に,複数の物体を操るための共通の潜在行動空間を抽出し,効率的に実環境においての対象物の操作を可能とするための枠組みを検討した.具体的には,シミュレータを用いた仮想環境内において,異なる形状のバルブを操作するための異なる方策を多関節ハンドロボットが学習し,それら複数の方策から生成される行動軌道群から変分自己符号化器を用いて共通の潜在行動空間を抽出,この潜在行動空間上で探索することにより,実環境におけるバルブ操作のための方策を少ないサンプル数で獲得できることを実験的に示した.
本手法は多関節ロボットハンドによる未知の形状の物体操りを効率化するものであり,将来的には産業界における多品種少量生産のニーズに答えることが期待される.
| 氏名 | コース | 研究室 | 役職/学年 |
|---|---|---|---|
| 古巻鉄平 | システム科学コース | 学習機械分野 | 博士1回生 |
| 八木聡明 | システム科学コース | 学習機械分野 | 助教 |
| 山森聡 | システム科学コース | 学習機械分野 | 研究員 |
| 森本淳 | システム科学コース | 学習機械分野 | 教授 |