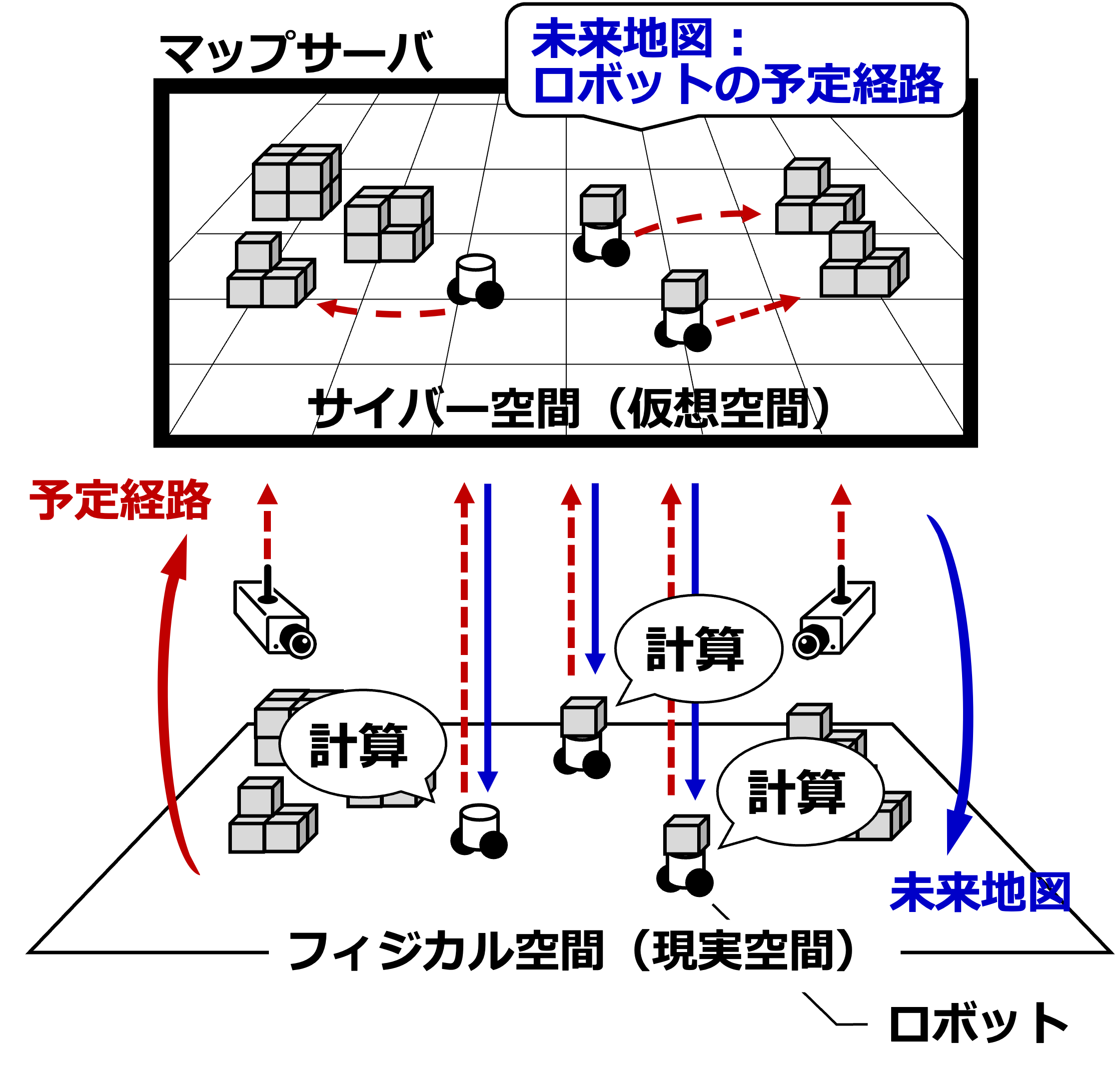
近年,倉庫で人間が行っていた作業(荷物の取り出しや配送など)を自動化する「スマートウェアハウス」と呼ばれる倉庫の需要が増加している.スマートウェアハウスの一形態として,荷物の搬送をロボットが行うものがあり,それにおける重要な技術のひとつは,多数のロボットを効率的に制御することである.この研究では,「未来地図」と呼ばれる,他のロボットが予定している経路の情報を用いて,ロボットの効率的な経路を高速で生成する方法を紹介する.
・2024問題の救世主
日本では,倉庫の荷物を集積する作業において,トラック運転手の待機時間が平均で1 時間45 分もかかることが問題になっている.また,今年の4月から運転手の労働時間の上限を制定する法律が施行された.そのため,運転手の待機時間を有効活用することが一層重要になった.そこで,本研究により,倉庫の搬送効率を向上させることで,運転手の待ち時間が減少し,トラック運転手の労働時間を有効に活用できる.
・低予算での工場建設
スマートウェアハウスなどの大型倉庫は,高速道路の側に建設することが多く,建設場所は限られる.それに加え,近年の倉庫の高い需要により,そのような土地の地価は上昇している.例えば,千葉県の柏IC付近は,一昨年から去年にかけて20% 以上も地価が上昇した.そこで,本研究により,倉庫の搬送効率が向上するため,荷物を保管する時間は減少する.その結果,荷物を保管するスペースを削減でき,倉庫の面積を従来よりも縮小できる.その結果,高騰した地価でも低予算で倉庫を建設することができる.
| 氏名 | コース | 研究室 | 役職/学年 |
|---|---|---|---|
| 松高 亜樹 | システム科学コース | 機械システム制御分野 | 博士1回生 |
| 東 俊一 | システム科学コース | 機械システム制御分野 | 教授 |