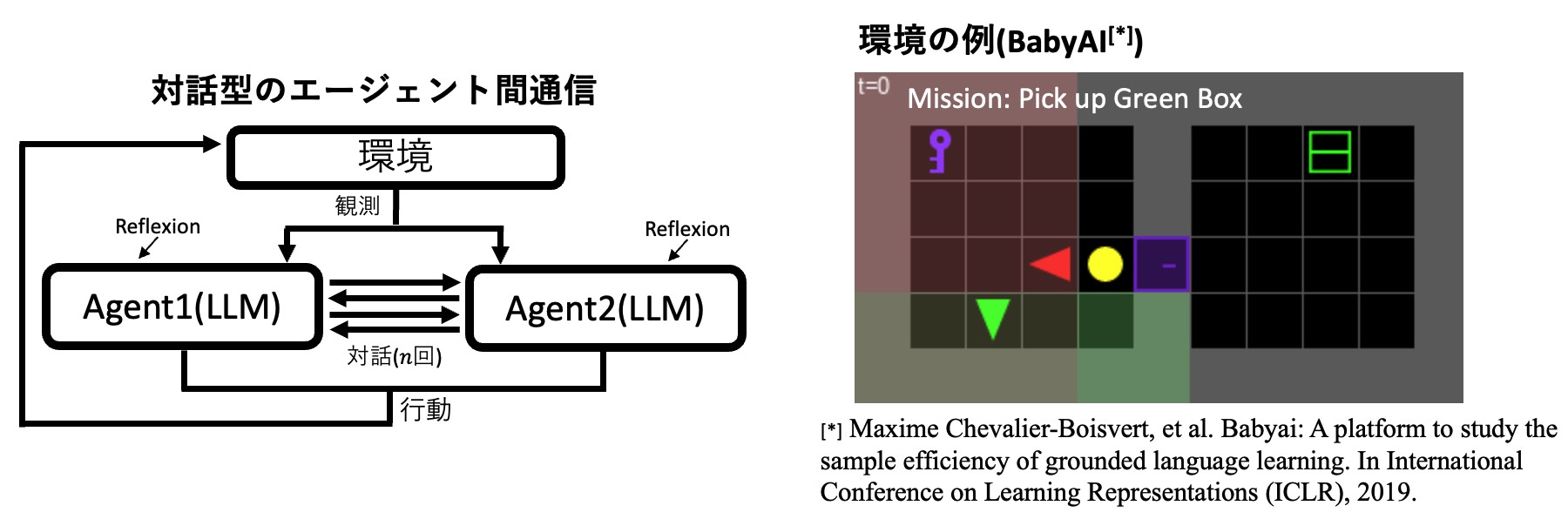
マルチエージェントシステムは災害救助や荷物の配達におけるドローン制御など, 様々な分野で利用されているが, エージェントを学習させる場合, 環境の複雑さから非常に多くの試行錯誤が必要で, サンプル効率が悪いという課題がある. そこで近年では, LLM を方策としたエージェントの制御についての研究が行われており, 非常に少ない回数の学習で環境への適応を達成している. しかし問題によっては, エージェント同士の協調や, 細かい制御が難しく, 適切な報酬設計や多くの学習が必要となる場合がある. そこで, 本研究では LLM を方策としたエージェントが, より効率よく学習をする方法を提案する. 具体的には, エージェント間通信について, 従来の双方向でのメッセージ交換から, 単方向での階層型, およびメッセージを交互に複数回送り合う対話型に変更することで, メッセージ内容の衝突や矛盾を解消する. Reflexionによる学習とBabyAI環境を用いたシミュレーション実験により, エージェントの行動, メッセージの内容などを分析し, 手法の有用性を確認する.
複数のドローンや自動運転車の制御といったマルチエージェントシステムの開発や, インタラクティブな環境で課題を達成する汎用的なエージェントの開発への適用が期待される.
| 氏名 | コース | 研究室 | 役職/学年 |
|---|---|---|---|
| 浅間 慶二郎 | 社会情報学コース | 伊藤研究室 | 修士2回生 |
| 伊藤 孝行 | 社会情報学コース | 伊藤研究室 | 教授 |
| 丁 世堯 | 社会情報学コース | 伊藤研究室 | 助教 |