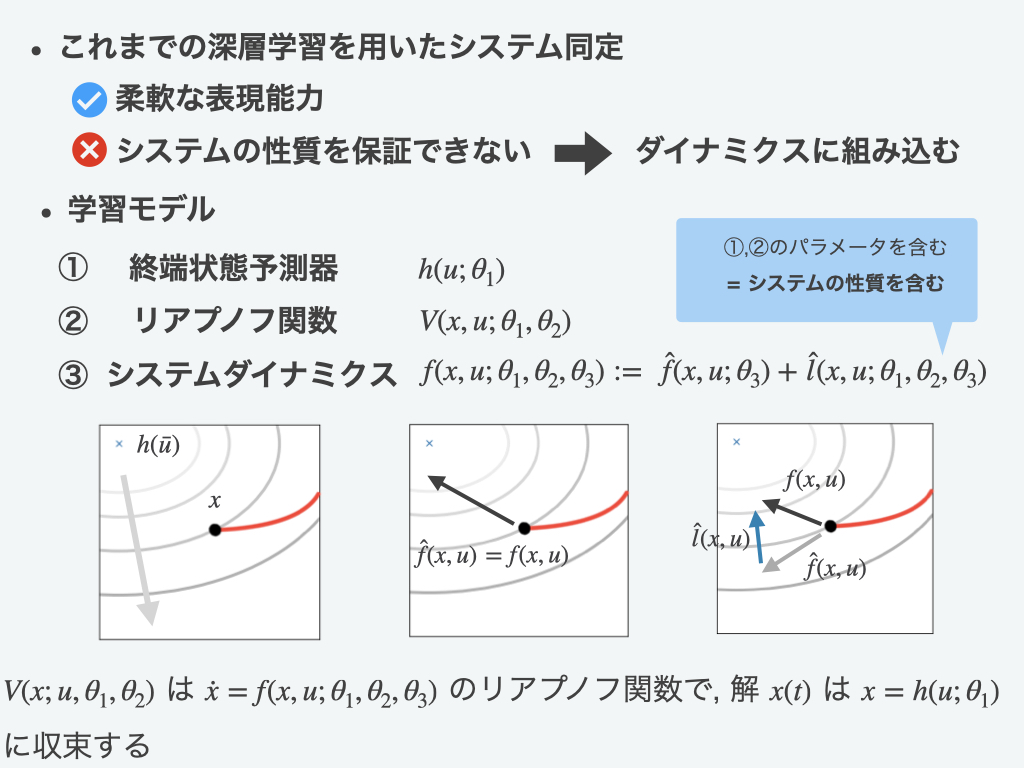
深層学習をはじめとするデータ駆動モデリングにおいて、背景にある物理的な先見情報を活用することは、モデルの信頼性向上や必要なデータ量の削減などにおいて非常に有用である。本研究では、制御において重要な動的性質である安定性に関する先見情報を取り入れる手法を提案し、その有効性を検証する。
動的システム一般。研究室では、エンジン吸排気系への応用に取り組んでいる。
https://www.bode.amp.i.kyoto-u.ac.jp/
ICTイノベーション
学内限定