自律移動ロボット群が協調して作業を行う際、全てのロボットが絶対座標系における現在位置を正確に知ることが重要である。しかし、精度の高いセンサやGPSを使えない環境においては、位置推定に誤差が生じ、その誤差の大きさや方向がそれぞれ異なることがある。
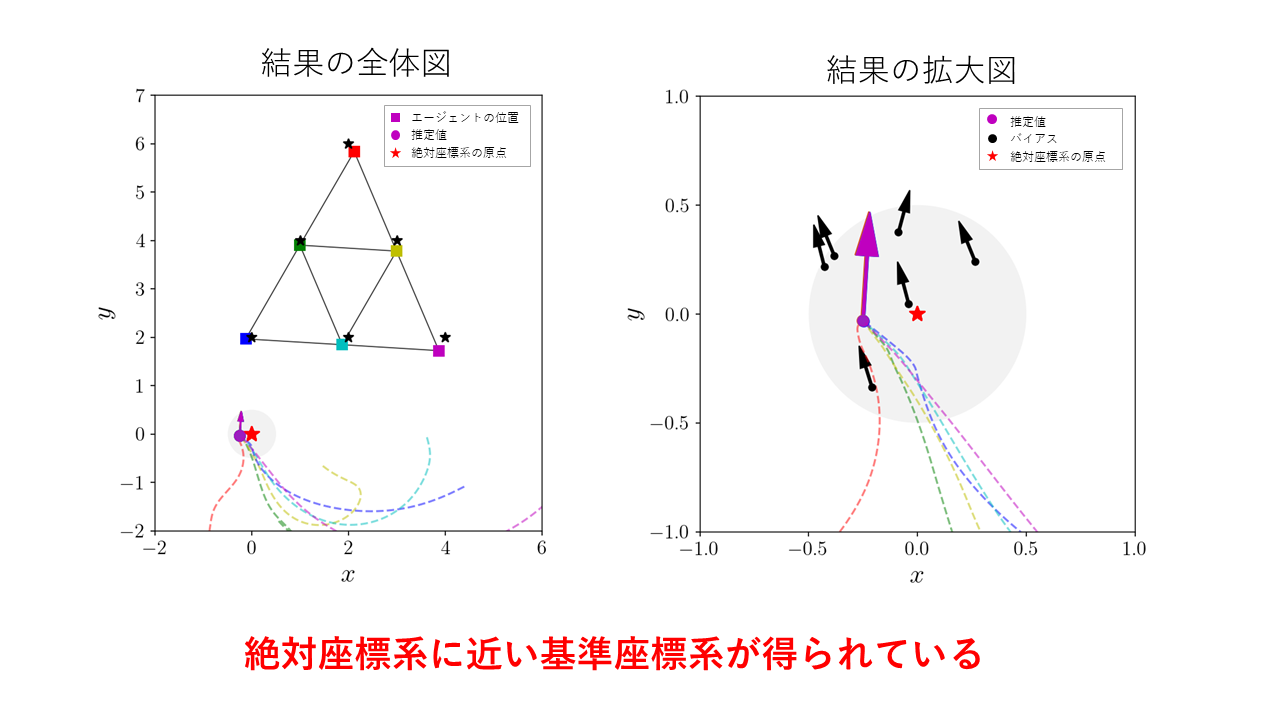
本研究ではフォーメーション制御を利用して、ロボット間の通信を行わずにセンシングのみで基準座標系を取得し、絶対座標系を推定する手法を提案する。既存手法は主に通信を行うもので、2次元空間での適用に限られる。一方、本研究の手法は2次元、3次元空間いずれにも適用可能である。
通信を伴わないマルチロボットの協調制御への応用が期待できる。例えば、水中ロボット群による海洋底のマッピングや小型ドローン群による捜索などがある。
| 氏名 | 専攻 | 研究室 | 役職/学年 |
|---|---|---|---|
| 浅井良 | システム科学専攻 | 統合動的システム論分野 | 修士1回生 |
| 桜間一徳 | システム科学専攻 | 統合動的システム論分野 | 准教授 |