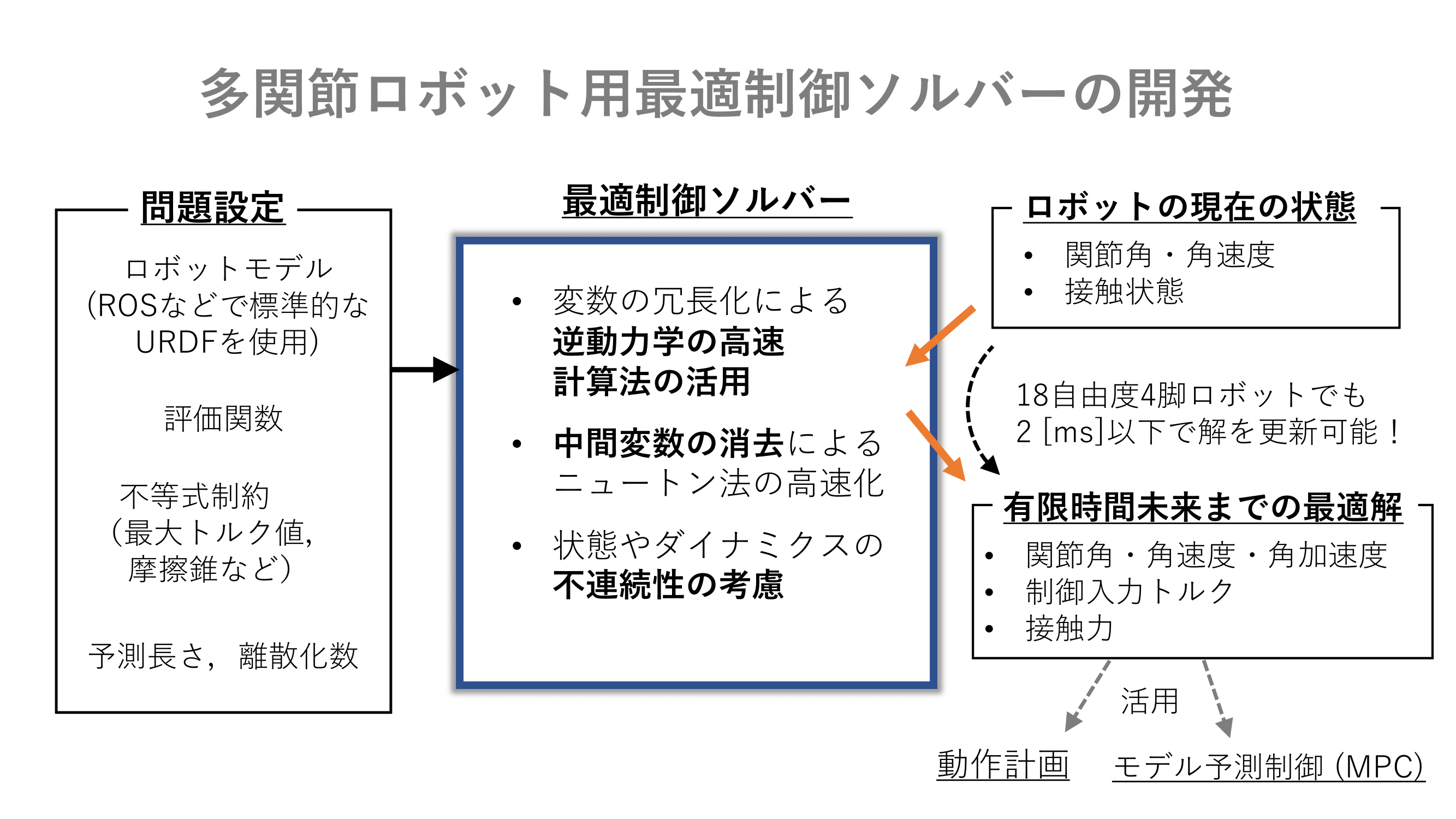
歩行や走行などのロボットのダイナミックな動作計画や制御に最適制御は非常に有効な技術である.
しかしロボットの持つダイナミクスの複雑さや自由度の高さから最適制御に必要な計算時間は膨大であり,特に最適制御をオンラインで解くモデル予測制御の実現は難しかった.
本研究では多関節ロボットの動力学計算アルゴリズムとニュートン法における効率的な変数消去を利用した最適制御のアルゴリズムを提案し,モデル予測制御の実現に向けたソルバーを開発した.
災害現場などへのロボットの派遣や宇宙空間の作業など多関節ロボットに対する期待は広がっている.
また本ソルバーは,ロボットのみならず,建機など多剛体としてモデリング可能なシステムに幅広く適用可能である.
| 氏名 | 専攻 | 研究室 | 役職/学年 |
|---|---|---|---|
| 片山想太郎 | システム科学専攻 | 統合動的システム論分野 | 博士2回生 |
| 大塚俊之 | システム科学専攻 | 統合動的システム論分野 | 教授 |