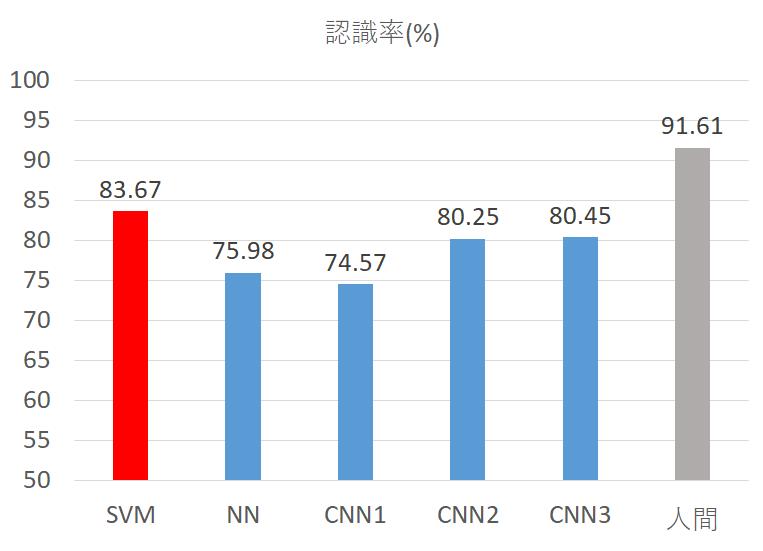
ロボットが店舗内の商品配置に関する整然性の認識手法について明らかにする。整然性というのは社会常識として人間の間に共有されているがロボットに共有するのは難しい。そのような人間間の常識が伴った整然性に関するデータを収集するためには多くの人から多様なデータを収集する必要がある。そこで、クラウドソーシングを用いて整然状態と整然ではない状態の商品の配置に関するデータを収集した。そして、そのデータに基づき、整然性を認識する技術の構築を進めた。結果として83.67%の精度で認識することができた。
店舗内で店員ロボットとして棚を整理する。人間と共同して店舗の運営を支えていくことができる。
| 氏名 | 専攻 | 研究室 | 役職/学年 |
|---|---|---|---|
| 戸崎真帆 | 社会情報学専攻 | 神田研究室 | 修士2回生 |